ALAT FILTRASI MINYAK JELANTAH OTOMATIS
KELOMPOK 34
1. Tujuan [Kembali]
1. Membuat Alat filtrasi minyak jelantah otomatis
2. Membuat Alat yang menerapkan PWM, Mikrokontroller, Komunikasi, dan, Sensor
2. Komponen [Kembali]
1. Sensor LDR

- Tegangan maksimum (DC) : 150 V
- Konsumsi Arus Maksimum : 100 mW
- Tingkatan Resistansi / Tahanan : 10 Ohm hingga 100k Ohm
- Puncak Spektral : 540 nm (ukuran gelombang cahaya)
- Waktu Respon Sensor : 20ms – 30 ms
- Suhu Operasi : -30o Celcius – 70o Celcius
2. Sensor Ultrasonik

- Tegangan : 5 VDC
- Arus : 15 mA
- Frekuensi Kerja : 40 KHz
- Jarak Minimum : 2 cm
- Jarak Maksimum : 400 cm (4 meter)
- Sudut Pengukuran : 15 Derajat
- Input Sinyal Trigger : 10uS pulsa TTL
- Output Sinyal Echo : Sinyal level TTL
- Dimensi : 45mm x 20 mm x 15 mm
3. Sensor MQ-2

Spesifikasi :
- Catu daya pemanas : 5V AC/DC
- Catu daya rangkaian : 5VDC
- Range pengukuran : 200 - 5000ppm untuk LPG, propane 300 - 5000ppm untuk butane 5000 - 20000ppm untuk methane 300 - 5000ppm untuk Hidrogen.
- Keluaran : analog (perubahan tegangan).
4. Arduino UNO


5. LCD 16 x 2

Spesifikasi :
- Tegangan operasi displat ini berkisar dari 4.7V hingga 5.3V.
- Bezel display adalah 72 x 25mm.
- Arus operasi adalah 1mA tanpa lampu latar.
- Warna LED untuk lampu latar adalah hijau atau biru.
- Jumlah kolom 16.
- Jumlah baris 2.
- Jumlah pin LCD 16.
- Ia bekerja dalam mode 4-bit dan 8-bit.
- Ukuran font karakter adalah lebar 0,125 x tinggi 0,200
6. Resistor 10k

Spesifikasi :
- Nilai resistansi : 10k Ohm
- Daya : 0.25 Watt / 0.5Watt
- Toleransi : 5%
- Jenis : film karbon
- Suhu kerja ; -55 – 150° C
- Polaritas : non polar
- Koefisien suhu : 350ppm/ °C
7. Ttransistor 2N2222A

Spesifikasi :
- Bi-Polar high current NPN Transistor
- DC Current Gain (hFE) is 100
- Continuous Collector current (IC) is 800mA
- Emitter Base Voltage (VBE) is 6V
- Collector Emitter Voltage (VCE) is 30V
- Base Current(IB) is 5mA maximum
- Available in To-92 Package
8. Motor pump DC

- Flow Rate : 80 ~ 120 L/H,
- Maximum Lift : 40 ~ 110 mm
- Operating Voltage : 6 ~ 9V
- Continuous Working Life : 500 hours
- Sold By Shoptron
9. Relay 5V

Spesifikasi :
- Input relay 5V DC
- Maksimum load 250VAC/10A 30VDC/10A
- Dilengkapi dengan optocoupler isolation untuk melindungi board microcontroller dari tegangan AC
- Memiliki LED indikator
- Menggunakan terminal block sehingga pemasangan kabel menjadi mudah
- Output keluaran 4 channel maksimal 10A
3. Landasan Teori [Kembali]

2. ADC
3. Mikrokontroler
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.

Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
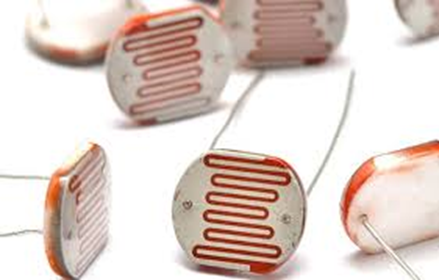
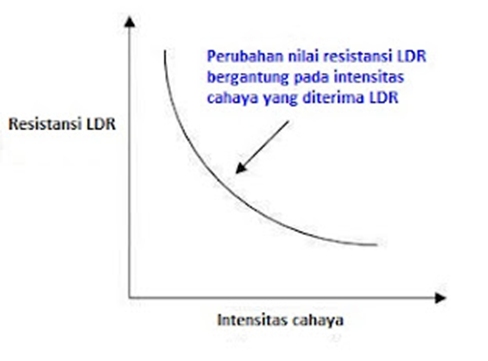
LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenai sensor ini. LDR juga dapat digunakan sebagai sensor cahaya. Perlu diketahui bahwa nilai resistansi dari sensor ini sangat bergantung pada intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka akan semakin menurun nilai resistansinya. Sebaliknya jika semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai hambatannya akan menjadi semakin besar sehingga arus listrik yang mengalir akan terhambat.
Beberapa karakteristik yang terdapat pada sensor LDR antara lain adalah :
· Tegangan maksimum (DC) : 150 V
· Konsumsi Arus Maksimum : 100 mW
· Tingkatan Resistansi / Tahanan : 10 Ohm hingga 100k Ohm
· Puncak Spektral : 540 nm (ukuran gelombang cahaya)
· Waktu Respon Sensor : 20ms – 30 ms
· Suhu Operasi : -30o Celcius – 70o Celcius
Fungsi Sensor LDRLDR berfungsi sebagai sebuah sensor cahaya dalam berbagai macam rangkaian elektronika seperti saklar otomatis berdasarkan cahaya yang jika sensor terkena cahaya maka arus listrik akan mengalir(ON) dan sebaliknya jika sensor dalam kondisi minim cahaya(gelap) maka aliran listrik akan terhambat(OFF). LDR juga sering digunakan sebagai sensor lampu penerang jalan otomatis, lampu kamar tidur, alarm, rangkaian anti maling otomatis menggunakan laser, sutter kamera otomatis, dan masih banyak lagi yang lainnya.
Cara Kerja Sensor LDR
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar.

7. Sensor Ultrasonik

Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.

- Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
- Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
- Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
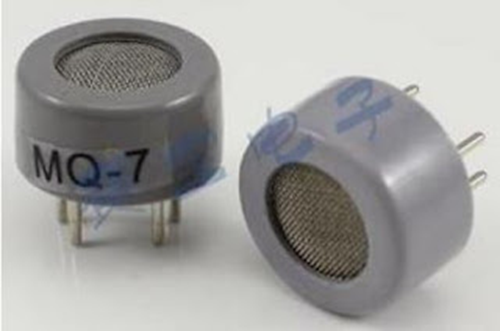

Prinsip Kerja Sensor MQ-7
Hambatan permukaan sensor Rs diperoleh melalui dipengaruhi sinyal output tegangan dari resistansi beban RL yang seri. Hubungan antara itu dijelaskan pada persamaan dibawah:

Setiap 14 pin digital pada arduino uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalwrite(), dan digitalRead(). Fungsi fungsi tersebut beroperasi di tegangan 5 volt, Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm.
Input dan Output
Setiap 14 pin digital pada ArduinoUno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor 20-50 Kohms.
- Catu Daya
- Memory
- Perangkat Lunak (Arduino Software)
- Pemograman
- Resetter
- Arduino IDE
LCD (Liquid Crystal Display) merupakan komponen elektronika yang berfungsi untuk menampilkan suatu data dapat berupa karakter, huruf, symbol maupun grafik. Karena ukurannya yang kecil maka LCD banyak dipasangkan dengan Mikrokontroller. LCD tersedia dalam bentuk modul yang mempunyai pin data, control catu daya, dan pengatur kontras.

Keterangan PIN LCD 16x2
- GND : catu daya 0Vdc
- VCC : catu daya positif
- Constrate : untuk kontras tulisan pada LCD
- RS atau Register Select :
- High : untuk mengirim data
- Low : untuk mengirim instruksi
- R/W atau Read/Write
- High : mengirim data
- Low : mengirim instruksi
- Disambungkan dengan LOW untuk pengiriman data ke layar
- E (enable) : untuk mengontrol ke LCD ketika bernilai LOW, LCD tidak dapat diakses
- D0 – D7 = Data Bus 0 – 7
- Backlight + : disambungkan ke VCC untuk menyalakan lampu latar.
- Backlight – : disambungkan ke GND untuk menyalakan lampu latar
10. Resistor

Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkaian elektronika. Satuan atau nilai resistansi suatu resistor disebut Ohm dilambangkan dengan simbol Omega (Ω).
Simbol Resistor :

Cara Menentukan Nilai Resistor :
Dengan Kode Warna :

Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
· Resistor dengan 5 cincin kode warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
· Resistor dengan 6 cincin warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
· Dengan Kode Huruf Resistor
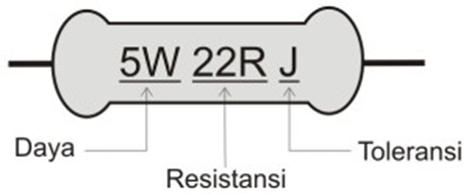
Kode Huruf Untuk Nilai Resistansi :
o R, berarti x1 (Ohm)
o K, berarti x1000 (KOhm)
o M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
o F, untuk toleransi 1%
o G, untuk toleransi 2%J, untuk toleransi 5%
o K, untuk toleransi 10%
o M, untuk toleransi 20%
Rumus Menentukan Nilai Resitor :
o Resistor Seri R(total) = R1+R2+ R(selanjut nya).
o Resistor Paralel R(total) = 1/R(total) = 1/R1 + 1/R2 + 1/R(seterusnya)
11. Transistor

Transistor merupakan alat semikonduktor yang dapat digunakan sebagai penguat sinyal, pemutus atau penyambung sinyal, stabilisasi tegangan, dan fungsi lainnya. Transistor memiliki 3 kaki elektroda, yaitu basis, kolektor, dan emitor. Pada rangkaian kali ini digunakan transistor 2SC1162 bertipe NPN. Transistor ini diperumpamakan sebagai saklar, yaitu ketika kaki basis diberi arus, maka arus pada kolektor akan mengalir ke emiter yang disebut dengan kondisi ON. Sedangkan ketika kaki basis tidak diberi arus, maka tidak ada arus mengalir dari kolektor ke emitor yang disebut dengan kondisi OFF. Namun, jika arus yang diberikan pada kaki basis melebihi arus pada kaki kolektor atau arus pada kaki kolektor adalah nol (karena tegangan kaki kolektor sekitar 0,2 - 0,3 V), maka transistor akan mengalami cutoff (saklar tertutup).
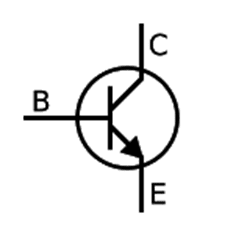
Transistor adalah sebuah komponen di dalam elektronika yang diciptakan dari bahan-bahan semikonduktor dan memiliki tiga buah kaki. Masing-masing kaki disebut sebagai basis, kolektor, dan emitor.
· Emitor (E) memiliki fungsi untuk menghasilkan elektron atau muatan negatif.
· Kolektor (C) berperan sebagai saluran bagi muatan negatif untuk keluar dari dalam transistor.
· Basis (B) berguna untuk mengatur arah gerak muatan negatif yang keluar dari transistor melalui kolektor.
12. Motor Pump DC (Motor DC)


Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.

4. Percobaan [Kembali]
- Program Master
- Program Slave
- Simulasi Proteus

- Prototype
5. Video [Kembali]
6. Link Download [Kembali]
- Download file HTML
- Download file rangkaian simulasi
- Download file program master
- Download file program slave
- Download file video
- Download datasheet sensor LDR
- Download datasheet sensor ultrasonik
- Download datasheet sensor MQ-7
- Download datasheet arduino
- Download datasheet lcd
- Download datasheet resistor
- Download datasheet transistor
- Download datasheet motor DC




Tidak ada komentar:
Posting Komentar